Agro Incubator
The purpose of the machine is to acquire information from a field of plants (which are individually grown in pots) that are stored on ebb and flow containers. The pots, possibly over 16000, are uniquely identified with RFID cards. The containers are transported towards a robot cell where the plants are unloaded and placed into plant holders (=trays). These holders are then directed to the imaging zone in certain sequences, programmed by the operator in the form of experiments containing treatments.
The imaging zone hosts a multitude of camera’s, all integrated by the end user using the WIWAM imaging API. The trays have a circular cutout to allow imaging the roots through transparant pots as well as adapter plates to support multiple pot sizes.
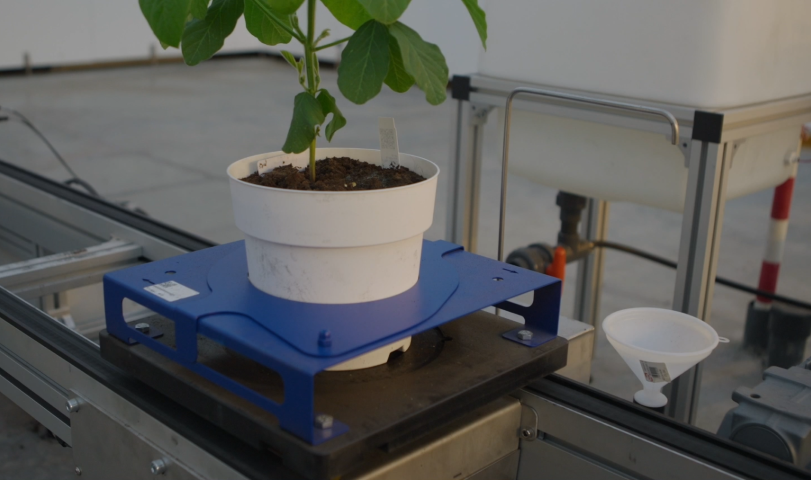
After imaging, the plants can be individually weighed and watered using nutrient solutions, and are then transported back to the robot cell to be repositioned onto the containers.
The conveyor part of the system can be used as a standalone phenotyping installation, e.g. to image plants growing elsewhere in the facility. In this case, the containers can move in parallel, allowing for example pruning of plants on the system or loading new experiments.
The container system is equipped with an ebb and flow watering system which can supply water to either 10 tables at once or to individual positions (depending on their position on the system). The watering jobs are executed at programmed intervals and preconfigured levels and soaking times. The water is drained from the containers to a gutter under the system using siphon valves.
The WIWAM experiment management software allows creating complex schedules, operating the imaging system, container system and flooding system in parallel. All individual plants are tracked through the system while randomization of containers and plants within the container is possible.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}